随着现代社会的发展,高层建筑数目与日俱增。电梯系统作为一种重要的室内运输工具,其必须具有很高的安全性和实时性。电梯控制系统主要由门厅外呼系统、轿厢内呼系统、门机系统和主控系统组成,同时也涉及大量的数据传输工作,包括呼叫楼层信号、轿内召唤楼层信号、电梯位置信号、电梯状态信号和电梯速度信号等等。这些信号的数量和楼层数成一定的正比关系。如果采用传统的PLC 点对点控制,对于高层楼宇来说,使用的线路数量会相当多,因此主控器的I /O 点也要求和线路数量相当,显然这种要求十分苛刻,并且电梯的后期维护麻烦、成本过高,也不利于电梯的安装。
国内一般采用RS485 标准较多,这种通讯协议都是一种基于主从式的网络结构,该结构只允许一个节点作为主站,该主站节点一旦出现故障,系统将处于瘫痪状态,因此很依赖主节点,并且这种通讯方式是“问答式”的,命令的发出和相应使得数据传输次数增多,影响系统的传输效率,没有较好的实时性,并且错误校验的能力也不强。而CAN 总线则具有很好的实时性和校验能力,是一种多主模式的总线,其连接方式也很简单,采用一对双绞线,通过串行通讯的方式将电梯的主控部分、轿厢部分、外呼部分和门机部分进行连接即可。由于CAN 总线任意节点可以在任何时刻进行信息的发送和接收,同时由于其具有良好的总线仲裁技术,可使得总线的冲突时间减少,大大提高了通讯网络的实时性。从它的信息帧发送方式来说,其拥有良好的信息帧检测方式,传输距离可达10KM,信息传输速度也很可观,因此CAN 总线比较适合应用于电梯控制系统中。这种布局也使得系统各个模块的作用更为明显,这种模块化十分明显的设计也在各个领域内得到了广泛的认可和应用。本论文以CAN 总线为通讯前提,以兼容CAN 总线的大连三合自动化研究的智能控件为核心,设计电梯控制系统。
1 基于SHCAN 总线的电梯系统的设计
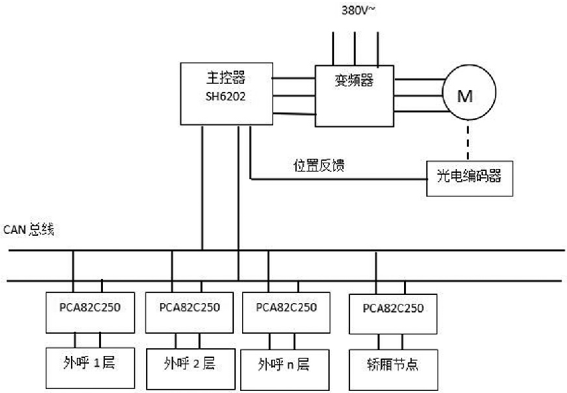
图1 SHCAN 总线电梯系统的结构
电梯控制系统如图1 所示,其主要分为两部分,即电气控制系统和电力拖动系统。其中电力拖动系统由变频器、永磁同步电机、减速装置和光电编码器组成。变频器通过主控器的控制来对电机的转速进行控制,同时电机的转速通过光电编码器来进行记录,并将电梯轿厢位置的信息反馈给主控器6202,从而实现电梯轿厢位置的判断。而电气控制主要由主控器控制、轿厢控制器控制和外呼控制器控制组成。
2 电梯主控节点的设计
当门厅呼叫信号或者轿厢内召信号产生时,该信号通过总线传输被主控器6202 接收,主控器6102 结合轿厢节点发送的楼层信息以及光电编码器产生的速度信息来执行相应的上行或下行动作控制。同时可以对各个楼层的呼叫信号进行记忆或消号,主控器也会将上下行信息发送至总线,门厅节点和轿厢节点则对其进行接收和显示。SH6202 智能控件拥有AI、AO、DI、DO 四种接口,并且可以进行端口扩展,同时其具有频率计数功能,可以实现对光电编码器的计数操作。主控器可以实现位置数据的记录、相关参数设置和变量的测量,主控器的通信原理图如图2 所示。
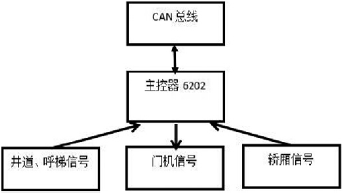
图2 主控节点原理图
同时主控器也会采集电梯系统的一些监控信息,比如平层开关信号、限位信号以及电梯门开关状态等信息。同时和轿厢节点、门机节点以及外呼节点进行实时通信。主控制器采集电梯井道内的一些安全信号、平层开关信号、门系统信号以及一些开关的反馈信号。主控器的具体设计图下图3 所示。其中变频器的反馈信号有电梯停止信号、运行信号、减速信号、欲开门信号以及故障信号,将这些信号的输出端由继电器来进行控制,通过继电器的动作来实现6202 的输入,从而保证主控器对变频器的及时控制。
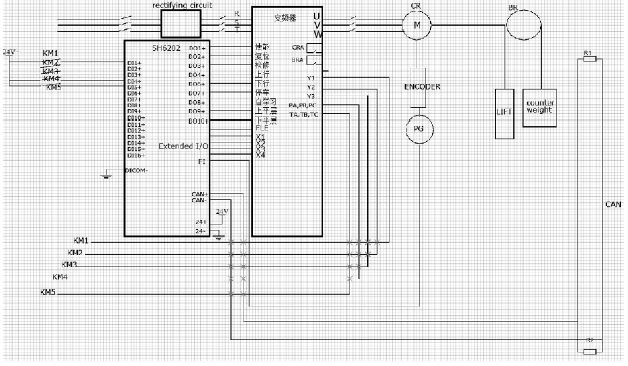
图3 主控节点硬件连接图
三合智能控件6202 具有16 路DI,9 路DO,可以实现通过I /O 口与变频器进行通信来达到控制效果,同时为了减少电梯移动电缆的连接数量,我们采用光电编码器来检测电梯的位置,将这种编码信号反馈给主控器,由于6202 中没有能进行频率计数的功能,这里需要用到三合另一个智能控件6102。
6102 具有8 路AI,2 路AO,5 路DI 和5 路DO,同时也有频率计数FI 端子。在上图的扩展模块中,我们引用6102 的频率计数功能的FI 电子和DO 功能,一方面实现主控器6202( 6102) 对光电编码脉冲的检测,从而达到电梯轿厢位置的跟踪,另一方面,也是为了扩展6102 的DO 端口,实现与变频器的通讯。同时主控节点为了与轿厢节点和外呼节点进行通讯,通过CAN总线连接在一个局域网中即可,而6202 和6102 具有CAN 总线端口,可以实现电梯系统高效的串行通讯。
3 轿厢节点设计
电梯轿厢控制器承担内召任务,同时它也要对电梯的运行信息进行显示,包括轿厢的位置、运行的方向。通过CAN 通讯来实现信号传输,向主控器发出楼层呼叫信息。除了呼叫信息,电梯轿厢还可能出现运行模式信号,比如司机模式、直驶模式等等,这些信号都是从轿厢节点发出的。主控器接收到信息诸如选层、电梯状态信息,在通过CAN 总线进行进行信息的反馈,例如轿厢超载报警就是通过主控器的反馈信号来执行的,在此期间,轿厢门不关闭,电梯系统抱闸,电梯平常并且电动机不动作,警铃报警和显示超载,从而确保乘客的人身安全。轿厢的系统结构图如下4 所示
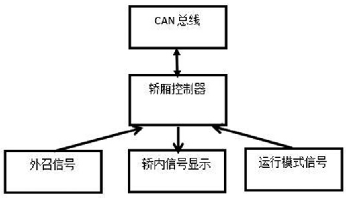
图4 轿厢节点原理图
4 外呼控制器设计
外呼控制器的作用和轿厢控制器类似,都需要采集电梯的呼叫信号,以及电梯运行方向和楼层数的显示,值得一提的时在电梯系统的基站需要设置锁梯开关、消防开关。利用CAN总线通讯的特点,不同楼层对外呼信息的ID 编码不同,从而使主控器可以判断呼叫的楼层数目,从而更准确的传达给变频器。在电梯正常运行期间,外呼节点将上呼下呼请求通过CAN总线传给主控器,主控器通过脉冲数判断电梯的运行楼层,将该楼层信息传送至总线,从而使外呼节点和轿厢节点内部显示电梯的运行楼层。外呼节点的原理图如下图5 所示。
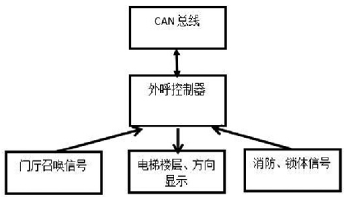
图5 外呼节点原理图
5 总结
基于SHCAN 总线的电梯系统的运行原理为: 电梯的变频器先启动自学习模式,即通过6202 的DO8 + 这个端口通知变频器进行自学习,在自学习模式下,电梯从建筑的底层开始向上缓慢运行,在上升过程中,每个平层都有光电感应器,电梯经过平层时,电梯轿厢的挡板部分会产生隔离信号,隔离信号从轿厢节点出发,通过CAN 总线传输给主控器,主控器向变频器的上平层和下平层端子输入信号,提示电梯此时此刻的位置,当电梯到达轿厢的顶层时,自学习结束。在这个自学习过程中,变频器记录了轿厢各个平层时刻的脉冲数,同时根据脉冲的分布,自行的产生电梯的加速和减速的位置。这种情况下,变频器需要设定为距离控制方式。当外呼节点发出呼梯请求时,请求信号通过CAN 总线传输达到主控器端,主控器根据CAN 通讯中的编码信息来识别楼层,并激活FLE 端子,提示变频器需要记录呼叫的楼层,呼叫的楼层通过扩展的I /O 端子从变频器的X1、X2、X3 和X4 端输入,通过四个端子的排列组合的输入方式,进行呼梯层数的记录。因此这种基于SHCAN 总线的控制方式,可以减少很多线缆的连接,,同时应用三合智能控件6102 和6202 来完成主控设计,现场各部分职能分工明确,对于主控器的依赖性减少,同时也方便电梯现场的安装和使用。



 上海育仰科教设备有限公司
上海育仰科教设备有限公司



