1 控制系统级永磁同步电机模型
电动汽车电机驱动系统的稳定性与安全性,与电动汽车综合驱动系统的正常运转直接相关。如果电动系统在车载动态与静态状况下出现故障,就表示着整个动力系统会产生运行阻力,对电动汽车动力系统产生巨大影响。但当前国内外对电动汽车的研究基本上都集中在离线故障检测方式上,对于电动汽车驱动系统传感器故障角度上的分析研究非常少。在永磁同步电机驱动系统(PMSMs)中,主要包含母线电压、速度以及电流三种传感器,具体如图1 所示。
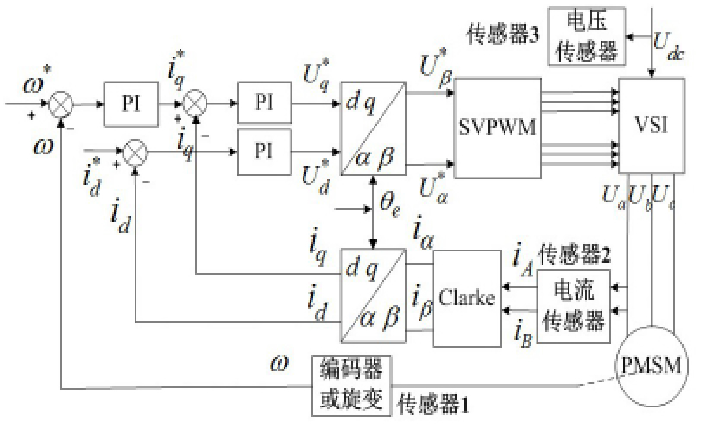
图1 永磁同步电机多传感器控制系统
母线电压与速度传感器两者均是一个,但电流传感器却比之多一个。由于两种及两种以上类型的传感器同时发生故障的比例极低,所以当前多数研究者均是单纯考虑一种传感器故障,速度传感器作为驱动系统的关键组成部分,受安装、运行条件等因素影响,极易在运转过程中出现故障,所以本文以电动汽车驱动系统中的速度传感器为主要研究对象,对其在实践运行中经常出现的故障进行检测与诊断技术分析。
2 电动汽车速度传感器工作基本原理
当前电动汽车电机驱动系统基本上都是使用光电式旋转编码器实现对电机的转速与转角展开双向监测, 在驱动电机正常运转时通过光电式旋转编码建立双方的参数实时统一传递装置,车辆处于车载动态状况下,驱动装置会与对接的编码器盘同时转动,转速或转角的具体参数信息会在同一时间发出。光电式旋转编码器在实践管理中,根据实践产所与外在环境的不同,在绝对式与增量式两种主要编码器中进行选择[1]。增量式编码器主要是在码盘四周按照一定的宽度将光栅分成固定等份,在电动机运转过程中实现一致性旋转,等分光栅会持续性的开或关光元件,光通路产生的波动会促使光敏元件按照对应频率发生反应,进而得出当前电动汽车电机的实际转速。
这样虽然能够较为准确的得出电机的实际转速,但并不能精准的判断出电机的实际旋转方向,所以在实践设计中通常会使用两对光敏及发光零部件,在实践中电动汽车生产厂商主要是利用M/T 方法,对电机的旋转方向进行参数值精准确定。电机转速在运转状态进行转变时,计算数值也会相应进行变化,如果电机处于高速旋转时,是利用高转速精准测量的M 测量方法;如果电机处于低速旋转时,是利用低转速精准测量的T 测量方法。因此,M/T 方法在电机的高、低旋转模式下均能进行旋转数值的精准测定,所以得到了电动汽车生产厂商的极大青睐。
3 速度传感器常见故障
电动汽车会在各种地形复杂、条件恶劣的路况下运行,会给速度传感器造成严重的影响,极易在运行过程中因为传感器运转环境较差出现故障[2]。相关研究数据表明,当前速度传感器的相关故障主要可以归纳为:数据信号卡断、数据信息不连续以及脉冲数降低等情况,具体故障现象与原因等具体分析情况如表1。
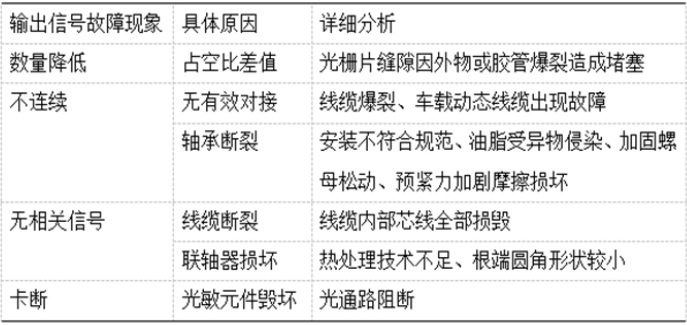
表1 速度传感器故障现象与具体原因分析
4 基于RBF 人工精神网络的传感器故障检测与诊断技术
4.1 RBF 人工神经网络基础
RBF 人工神经网络是经典的前馈神经诊断系统,由于其具有非常强的部分函数逼近能力,所以被认为是最常用的部分函数逼近神经系统。在系统实践应用中,利用RBF 网络来进行函数计算逼近更加高效,且提升该网络训练消耗的时间相比其他措施要有所缩短,比较适应当前的实时监测诊断系统[3]。相关理论研究表明,在固定规模神经元情况下,以期寻求单独的RBF网络用任何精度对函数进行无限逼近,基于RBF 网络具有的独特优势在电动汽车领域大力推广此技术具有非常重要的意义。其基本网络结构属于三层前馈模式,含有输出、输入与隐含三个层次,其中输入层主要是实现输送数据到隐含层的传送,在这一过程中要保证各节点传递渠道的通畅性;隐含层节点的传动函数通常是由辐射式高斯函数神经元组成。
4.2 RBF 人工精神网络传感器故障检测诊断技术
离线故障诊断技术和在线故障诊断技术组成了速度传感器故障诊断技术,并依托于人工神经网络技术而飞速发展。
通过离线诊断技术来排除故障,神经网络技术的探究过程和实践过程也不是同时进行的。技术人员确定了电机驱动系统运行状态和运行规律的参数后,可利用神经网络技术,使用参数数据进行数学建模,保证输入的数据满足在实际运行系统的要求,来进行网络探究深度和输出准确度等操作。离线故障诊断技术建立的数学建模是一成不变的,神经网络技术应用在事先设定好的参数下进行操作,而这样的操作可切实的学习和诊断被操控目标,它的规律在工作状态下可以完美的展现出来。
使用离线故障诊断技术的条件应满足:结构和参数数据稳定;在线输出的操作系统可作为参考。
在线故障诊断技术的应用,是将神经网络技术直接应用与电机驱动系统,进行直连,电机驱动系统的参数会直接传输到神经网络系统,由神经网络系统进行数学建模比对分析,来判定故障原因及现象。在线故障诊断技术在神经网络技术中建立的数学建模是实时更新的。将神经网络技术应用于速度传感器测量值的监测当中,在电动汽车电机驱动系统速度传感器发生异常时,会出现相应的诊断信息,根据诊断信息可直接了解产生速度传感器发生异常的原因[4]。在当下许多电机驱动系统存在着很多运行不稳定的原因,也不能得到准确数据进行准确的数学建模,而在线故障诊断技术可以很好的解决这一问题。电机驱动系统在电动汽车中的应用,十分复杂,也会产生诸多不确定的因素,所以本文着重讲解在线故障诊断技术在电动汽车速度传感器的应用。
RBF 人工神经网络技术应用于预测速度传感器数据采集比对中,是建立在神经网络技术应用电动汽车速度所呈现的预测模型上,在之前采集的数据中选择多个时间段的速度传感器实测值作为神经网络的输入值,将当前时间采集的速度传感器的数据(神经网络预测值)作为神经网络的输出值。速度传感器实测值与神经网络预测值所产生的残差序列,来进行故障监测和诊断,具体如图2 所示。
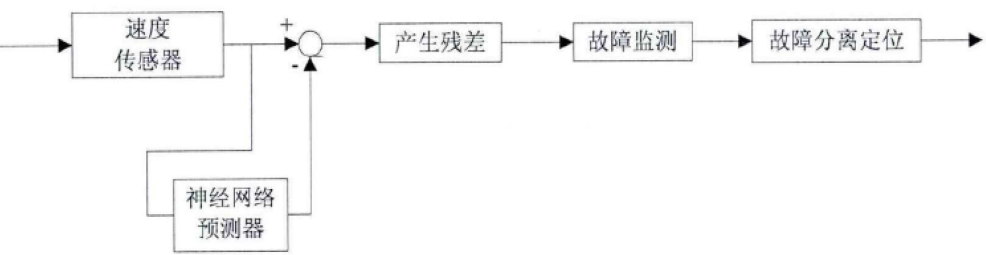
图2 神经网络监测器诊断技术原理图
由此得出RBF 神经网络技术应用于对速度传感器的监测技术中,建立了完善的RBF 神经网络预测系统,完美的体现了在线故障诊断技术。这种通过采集实时速度传感器数据与RBF 神经网络预测输出值所产生的残差序列,将在线故障诊断技术完全应用到速度传感器的故障。在线故障诊断技术不仅实用性高,而且诊断故障率高,在电动汽车电机驱动系统十分适用。
4.3 电动汽车驱动系统传感器故障诊断实证研究
某品牌正常使用年限内的电动汽车于冬季在公路上处于正常形式状态,电动汽车驱动系统故障预警装置突然发出预警提示音,随之仪表盘提示输出信号断续,需要及时停车进行维修。初步确诊是由于速度传感器出现接触不良或轴承损坏现象,经深入探查发现这主要是由于驱动系统在正常运转时,速度传感器轴承发生损坏所致。分析原因主要是由于轴承本身油脂受异物入侵不能进行及时有效的清洁,加上轴承预紧力过大加剧运转磨损导致的。电动汽车在运转中由于轴承始终承担着整个车的运转载量,在运转中轴承清洁等不到位会进一步加大运转阻力,出现输出信号不连贯现象,严重影响车辆的安全性与稳定性,使车辆性能大幅度降低。
在实践案例中,通常将传感器故障分为硬故障与软故障,即按照传感器的不可修复硬件损毁与受一定因素影响出现的监测精准度下降、测量误差增加等情况进行区分。由于电动汽车驱动系统传感器在极易受到外界环境、运行状况等因素影响,虽然电动汽车生产厂商已经极力完善驱动系统,但在实际使用中仍然存在传感器故障威胁,利用本文相关理论及技术,使用RBF 神经网络故障监测诊断技术,建立传感器相关模型与通电线路,能实时提取传感器动态参数,将监测参数信号传递给驱动总控制系统进行及时有效处理。实践数据表明,此方法能有效提高监测精准度,最大限度降低传感器故障风险发生几率。
结束语
电动汽车驱动系统是一个非常繁杂、精密的系统,而速度传感器是确保驱动系统正常运转的关键环节,所以为提高驱动系统在实践应用中的安全系数与稳定性能,避免速度传感器故障造成车辆本身安全与车载人员的生命财产安全受到威胁,对传感器的车载状态参数信息进行实时精准掌控,并对常见故障进行及时有效的处理就显得尤为重要了。在实践应用中可以利用RBF 人工神经网络监测诊断技术,对速度传感器的故障进行精确诊断,及时有效的进行故障排除,为人们的生命财产安全提供有力保障。



 上海育仰科教设备有限公司
上海育仰科教设备有限公司



